

工作原理
旋转功能选项:(型号为VSM-4000LL-SCAN-3D-TRACK-EXT)
旋转部件应用图示
利用高速/先进的扫描镜片代替光学反旋转器
优点:
使得用户能把普通的3D扫描测振仪和旋转跟踪选件结合
用户无须使用旋转物和反旋转器的精确的机械对中
对中操作由软件完成,无须用户参与
可以实现有倾角地对旋转物体进行跟踪轨迹可以是个椭圆,不一定是个园
完整的模态分析能力
JULIGHT公司 VSM-4000LL-3D-SCAN-TRACK-EXT 激光测振仪可以用来完成完整的模态分析测试,比如3D的ODS测试和分析,对于测试件需要用户加力进行激励的实验室模态,VSM-3D-SCAN的三束激光可以获取3D的EMA(实验模态)。如果在实验现场,当测试件的振动是由自然激励或环境激励引起时,额外的单点激光测振仪(OH-1000L)可以用着参考通道,这样就可以进行OMA的模态试验 。
工作原理:
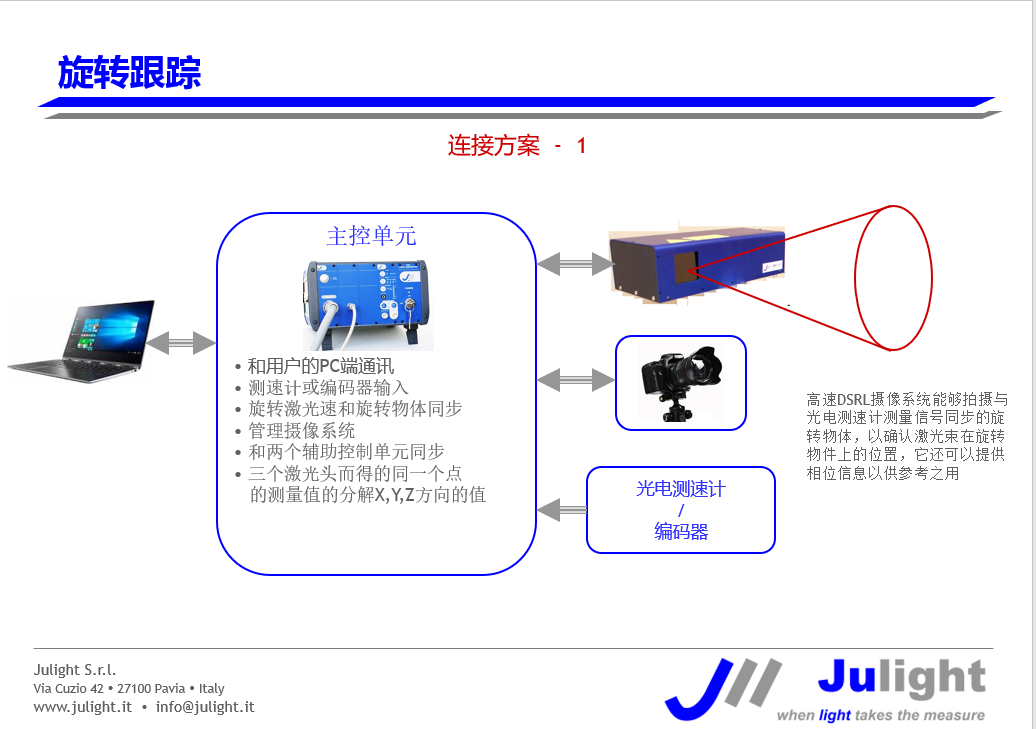
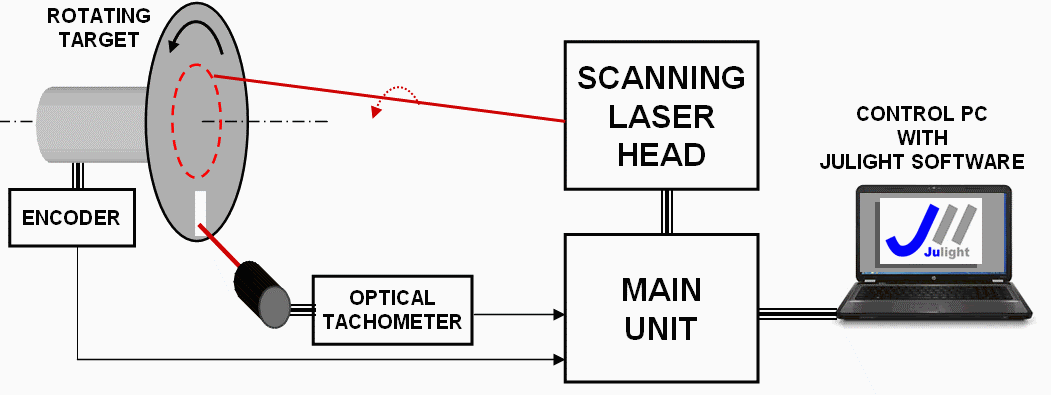
JULIGHT公司的激光扫描测振仪(2D和3D)可以和旋转跟踪器选项配合,对旋转目标如碟片,车轮,风扇,发动机叶片等在旋转过程中进行精确的振动和模态测量。
对旋转目标上测点的跟踪是通过驱动两轴向光镜实时同步旋转,这样使得激光束总能对准旋转表面的同一个点。使用三套旋转跟踪器选项,和3D扫描激光测振仪配合,可以做3D振动测量,即使用三束激光,从不同角度对准旋转面上的同一个点进行测量。
旋转跟踪器选项是通过一个非常精密和电子硬件和软件控制完美结合来实现和旋转目标同步旋转的。系统从测速仪或速度解码器SNS-1000-TACHO获取转速信号,它可以使激光束和旋转目标同步运动。用户可以从两个方向选择被跟踪点的位置:径向方向和切向方向。切向方向跟踪的相位从0到360度,即:旋转目标上的所有点可以被跟踪,这样的旋转-扫描振动测量几乎和旋转目标静态时测量一样,在旋转跟踪扫描期间的不同测点是从测试结构处于静态状态时的图像中识别出来,而这些图像是通过每个扫描头上的摄像机获取的。
旋转跟踪选件的工作原理是基于三维扫描激光束的圆形轨迹来工作的。激光束是根据测试件的旋转速度(由编码器或测速计获取)以及由用户在Julight控制软件里的摄像机窗口所画的圆,由软件自动执行,预测试测试功能允许用户检查所投射的激光束是否正确地对准测试件。
系统都是自动对中和自动对焦,用户无需经过很复杂的调试过程。
对于一些转速变化的旋转目标(比如电机的开启和关机过程),系统也能准确和实时地跟踪转速变化,使得激光束快速实时调整,准确地跟踪转速变化的目标。
由于旋转目标高速旋转,激励力信号是无法测量,JULIGHT公司采用额外的激光头(OH-1000-L),这个激光头瞄准旋转目标的中心位置(即固定点)作为参考点来对旋转激光束的振动测量结果进行相位调整。
系统采用由Nikon或Canon公司生产的高速摄像系统(可选),可以抓拍处于超高速旋转物体的图片,这样用户就可以检查激光束是否准确地瞄准被测点。该摄像系统的抓拍指标:1/8000 的曝光时间,和旋转件的计速信号同步,这样就可以识别激光束的角度和径向位置,角度相位精度可达<0.5° @1000 rpm, and 2° @10000 rpm。
指标说明如下表:
旋转功能:
输入信号:高精度测速仪(TTL)
脉冲角度解码器(TTL)
同步跟踪装置信号
最大转速20,000 RPM
最大转速变化率:1000 rpm/s
允许的角度范围:50° x 50°x 50° (全场)
相位跟踪误差:<0.5° (测速仪信号)
<0.2° (解码器信号
激光光斑尺寸100um( 直径)
供电要求电压110V/220V
特点:
· 同时测量1个点的三个方向,而且以一定的速率扫描。
· 光束的排列可由用户选择
· 极高的测定灵敏度
· 一次射测可测得相位差
· 耐用的设计
2. 使用
光学头必须放在工作距离在0.2到1.2米间(或其他工作距离)的振动表面的前端。测量的电信号从电子单元的BNC端口输出。信号可以输出给示波器/ 数采系统,或给FFT分析仪进行频域分析。
LED-BAR指示仪实时测量反散射光信号长度,以便避免由于散斑图样影响而引起的信号衰落。
全自动斑点跟踪允许可以允许对漫射表面的无随员操作:系统可以全自动跟踪目标表面的亮点,消除信号衰落。
3. 应用
• 位移和振动的非接触测量(在非常低的频率处)
• 对小,软和精致的结构的无质量负载的振动测量
• 材料和结构分析
• 汽车,航天和能源工业(发动机和汽轮机监测,有效性测量)
• 喇叭,压电陶瓷和MEMS测量/特性定义
• 模态分析,全场应力应变测试及疲劳分析及寿命预估
• 工厂在线过程控制
• 机器的状态监测

更多详情请与我们联系13926445709(微电)